



This website uses cookies so that we can provide you with the best user experience possible. Cookie information is stored in your browser and performs functions such as recognising you when you return to our website and helping our team to understand which sections of the website you find most interesting and useful.
PS2P-LIN
Linear Touchless Hall-Effect Position Sensor
Piher Sensing Systems’ PS2P-LIN compact linear position sensor delivers true contact-free sensing for harsh industrial and vehicle environments in a low profile and robust magnetic design.
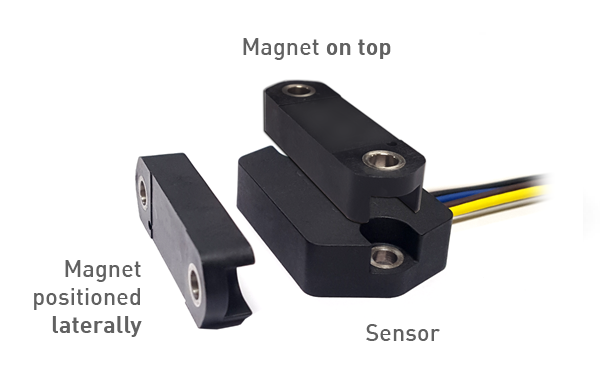
Magnet and sensor module are placed in separate housings without the need for any gears, bearings or linkages and can be placed anywhere on the moving object. This allows for easy mounting, thereby delivering additional cost reduction on the production line. Furthermore, without wear and tear of radial forces product reliability and lifetime are increased significantly.
The PS2P-LIN measures changes in linear position relative to the sensor by detecting the movement of a magnetized magnet that is located in a separate housing and is only sensitive to the flux density coplanar with the IC surface.
The PS2P series is complemented by touchless rotary (PS2P-CON) and play resistant arc (PS2P-ARC) position sensors. All sensors of the series are absolute sensors and will deliver the same level of precision and stability throughout their lifetime as on the first day they are installed – despite extremes of vibration, shock, temperature and contamination. For longer measurement ranges, Piher designs and manufactures long stroke inductive linear sensors.
KEY FEATURES

Provides two independent signals to support redundancy, fault detection and safer position feedback in demanding applications.

Without any internal or external gears or linkages the sensor is easily assembled and calibrated and free from wear and tear over lifetime.
The separation of electronics and magnet module allows for a virtually unlimited lifetime independent of number of revolutions.

Accurate linear displacement feedback of up to 25mm. Other/higher ranges are available upon request.
Without the need for a shaft the sensor is
provided in a exceptionally compact and
low profile package that fits in space
constraint applications.

The rugged package protects the sensor from dust, moisture, vibration and extreme temperatures for usage in the most demanding environments.
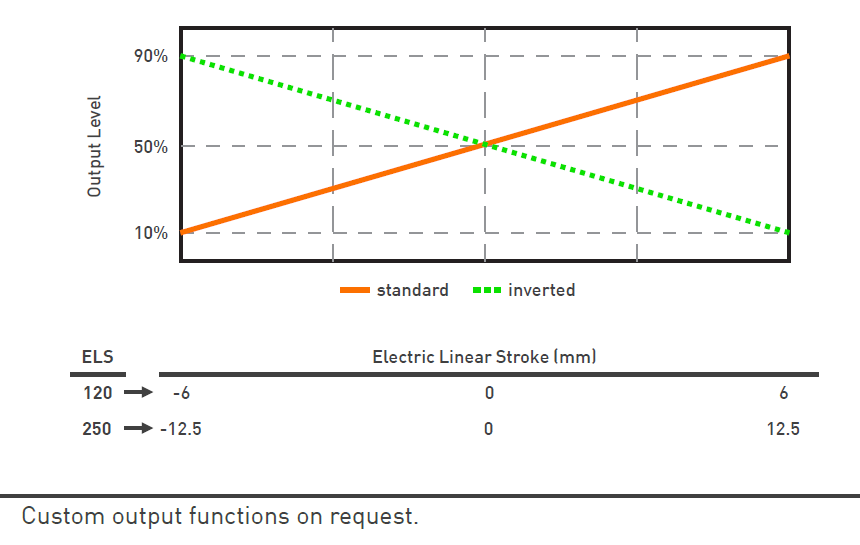
Programmable transfer function and
switch outputs as well as different output
protocols and redundancy levels
available
SPECIFICATIONS
| Linearity* |
Analog and PWM: ±1% absolute (±0.5% upon request) CAN: ±0.2 mm absolute |
| Measurement range** |
0 to 12mm 0 to 25 mm |
| Output protocol |
Analog (Ratiometric), CAN, PWM SPI on request |
| Output |
Simple Redundant Full-redundant |
| Switch | On request |
| Resolution |
Analog, CAN, PWM -
Up to 12 bit SPI - Up to 14 bit |
| Supply voltage*** |
5V ±10% 7V-15V (A&PWM) / 7V-32V (CAN) |
| Supply current |
Single version - Typ 8.5 mA Redundant version - Typ 17 mA CAN version - Typ 47 mA |
| Voltage protection | ±10V |
| Self-diagnostic features | yes |
* Ferromagnetic materials close to the sensor (i.e. shaft, mounting surface) may affect the sensor’s linearity.
** For other linear ranges please contact Piher Sensing Systems.
*** Voltages up to 25 V possible on request.
| Life | Virtually unlimited |
| Nominal air gap | 3mm between plastic parts |
| Maximum air gap | 5mm, higher on request |
| Maximum allowed lateral offset | ±1mm |
| Operating and storage temperature* |
Analog, PWM, SPI
: -40°C to +125°C
CAN: -40°C to +85°C |
| Shock | 50g |
| Vibration | 5Hz to 2000 Hz; 20g; Amax 0,75 mm |
| Sealing** | IP67, IP69K |
| Approval | CE2 |
* Other specifications available
** CE-approval applies to analogic models.
POTENTIAL APPLICATIONS