Why Position, Speed and Tilt Sensors Are Essential in Robotics
Robots are becoming more capable, more autonomous and more present in industrial, logistics, service and mobility applications. Artificial intelligence is helping robots interpret situations and make decisions, but AI cannot act safely or accurately without reliable sensor data.
Every robotic movement depends on feedback. A robot must know where its joints are, how fast an actuator is moving, whether a platform is level, how far a mechanism has travelled and whether its position has changed unexpectedly. This is why position, speed and tilt sensors are critical components in modern robotics.
As robotics evolves from fixed industrial arms to collaborative robots, autonomous mobile robots and humanoid platforms, the number of sensors per robot continues to increase. More autonomy means more perception, more control loops and more real-time feedback.
Sensors turn robot motion into usable data
A robot is not only a mechanical system. It is a closed-loop control system.
Motors, gears, actuators and linkages create movement. Sensors measure that movement and send feedback to the controller. The controller compares the actual position, angle, speed or inclination with the target value and corrects the motion.
Without this feedback, a robot cannot perform repeatable and safe movements. It may overshoot a position, apply force at the wrong angle, lose orientation or fail to detect a mechanical deviation.
Position, speed and tilt sensors provide the data needed to answer three basic robotic questions:
Where is the mechanism?
This is measured by position sensors.
How fast is it moving?
This is measured directly or derived from movement feedback.
Is the system correctly oriented?
This is measured by tilt or inclination sensors.
These three types of feedback are especially important in applications where movement accuracy, safety and uptime are essential.
 Position sensors: knowing exactly where the robot is
Position sensors: knowing exactly where the robot is
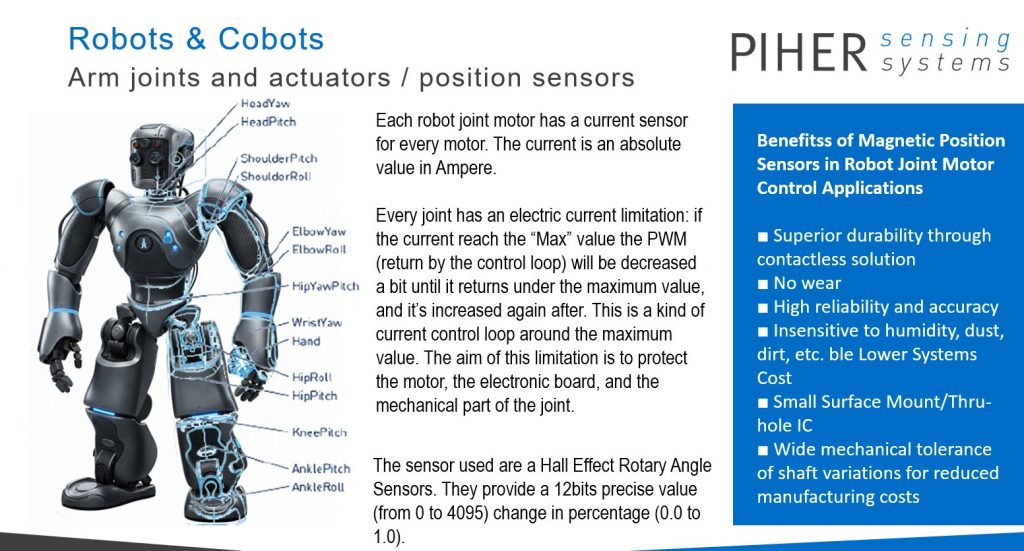
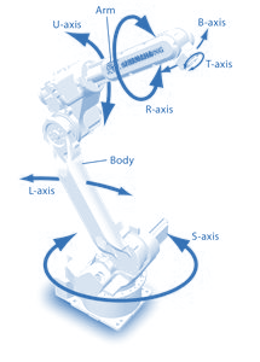
Position sensors are among the most important sensing elements in robotics. They detect linear or angular movement and provide feedback on the exact position of a joint, actuator, lever, shaft, gripper or moving assembly.
In a robotic arm, position sensors can help control each joint angle. In a gripper, they can confirm whether the mechanism is open, closed or partially engaged. In an autonomous mobile robot, they can support steering, suspension or actuator position monitoring.
Position feedback is essential for:
- Robotic arm joints
- End effectors and grippers
- Linear actuators
- Steering systems
- Lift mechanisms
- Mobile hydraulics platforms
- Human-machine interface controls
- Service robotics mechanisms
For robotics, non-contact position sensing is especially valuable. Technologies such as Hall-effect or inductive sensing reduce mechanical wear because there is no physical contact between the sensing element and the moving target. This helps improve lifetime, repeatability and reliability in demanding environments.
In industrial robotics, this can mean more production cycles with less maintenance. In mobile robots, it can mean better resistance to vibration, dust, humidity and temperature changes. In collaborative robots, it supports smoother and more predictable motion.
Rotary Position Feedback for Robotic Joints and Mobile Robots
 Engineers designing robotic arms, autonomous mobile robots (AMRs), automated guided vehicles (AGVs), and warehouse automation equipment often require continuous angular position feedback with long service life and minimal maintenance.
Engineers designing robotic arms, autonomous mobile robots (AMRs), automated guided vehicles (AGVs), and warehouse automation equipment often require continuous angular position feedback with long service life and minimal maintenance.
The PSC-360 Dual Output Hall-effect rotary position sensor provides 360° absolute position feedback through a true contactless architecture. With programmable electrical angles from 15° to 360°, endless rotation capability, and support for analog, PWM, CANopen, and SAE J1939 outputs, it can be integrated into a wide range of robotic motion-control systems. The sensor is available in redundant and full-redundant configurations and is designed for harsh industrial environments with IP67/IP69K protection and operating temperatures up to +125°C.
Typical robotics applications include:
- Steering angle feedback in AMRs
- Robot arm position sensing
- Conveyor and material handling systems
- Autonomous warehouse robotics
- Lift and actuator monitoring
- Mobile robot drive systems
Speed sensors: controlling motion, acceleration and response
Speed is one of the key variables in robotic control. A robot does not only need to reach the correct position. It must also move at the correct speed.
Speed feedback helps the controller manage acceleration, deceleration, synchronization and safety limits. It can prevent sudden movements, reduce vibration and improve the coordination between different axes.
In many robotic systems, speed can be measured directly or calculated from position feedback over time. For example, if a controller knows how the angular position of a joint changes over milliseconds, it can calculate rotational speed and adjust motor control accordingly.
Speed feedback is important for:
- Motor and actuator control
- Conveyor and handling systems
- Robotic joint movement
- Automated guided vehicles
- Autonomous mobile robots
- Collaborative robot safety
- Precision dispensing or pick-and-place systems
Accurate speed sensing helps robots move more naturally and efficiently. It also contributes to safety. If a robot detects that a mechanism is moving faster than expected, the control system can slow it down or stop it before a hazardous situation develops.
This becomes more important as robots work closer to people. Collaborative robots, service robots and mobile robots must adapt their movement in real time when humans, objects or other machines enter their operating area.
Tilt sensors: keeping robots stable and correctly oriented
Tilt sensors, also known as inclinometers, measure the angle of an object relative to gravity. In robotics, they are used to detect inclination, platform angle, slope, rollover risk or orientation changes.
Tilt sensing is especially important in mobile and autonomous robots. A robot operating on uneven ground must know whether it is climbing a ramp, crossing an obstacle, leaning sideways or approaching an unsafe angle.
Tilt sensors are useful in:
- Autonomous mobile robots
- Agricultural robots
- Construction and inspection robots
- Warehouse vehicles
- Lifting platforms
- Service robots
- Humanoid robots
- Robotic equipment operating on slopes
For humanoid and legged robots, tilt feedback is part of the wider balance and stability problem. Vision and AI may help the robot understand its environment, but tilt sensors provide direct information about orientation and body angle.
In industrial equipment, tilt sensors can help protect machinery by detecting unsafe inclination before damage occurs. In mobile robotics, they can improve navigation, load handling and stability control.
AI makes robots smarter, but sensors make them aware
Recent developments in robotics are closely linked to AI and edge computing. Robots are increasingly able to process local data, react to changing conditions and coordinate multiple tasks.
AI can help a robot decide what to do when an object is dropped, when a human enters its path or when a task changes. It can support object recognition, route planning, predictive maintenance and adaptive control.
But AI still needs trustworthy input.
A robot cannot reason about its movement if it does not know its actual position. It cannot adjust its motion if it does not know speed. It cannot stay stable if it does not know its tilt or orientation.
This is why the growth of robotics is also a sensor story. As robots become more autonomous, they need more sensing points, more redundancy and more robust feedback across the whole system.
From fixed robot arms to autonomous machines
Traditional industrial robots often operate in fixed positions inside controlled environments. Their movements are programmed and repeated thousands or millions of times.
Modern robotics is expanding beyond that model.
Robots are now moving through warehouses, inspecting infrastructure, serving food and drinks, handling logistics tasks and assisting operators. Some are collaborative arms designed to work close to people. Others are mobile platforms that combine navigation, object detection, positioning and actuator control.
This shift increases the importance of embedded sensors.
A fixed robot arm may need precise joint feedback. A mobile robot also needs steering feedback, tilt detection, actuator monitoring and safety-related sensing. A humanoid robot may need position feedback in many joints, plus tilt, force, tactile and vision data.
The more complex the robot, the more critical the sensor architecture becomes.
Why sensor reliability matters in robotics
Robotics applications often involve continuous movement, vibration, dust, temperature variation and electrical noise. Sensors must operate reliably inside these conditions.
For engineers designing robotic systems, the choice of sensor affects:
- Accuracy
- Repeatability
- Response time
- Durability
- Safety
- Maintenance requirements
- System integration
- Total cost of ownership
A low-cost component can become expensive if it creates downtime, recalibration, unstable readings or premature failure. For this reason, robotics designers often prioritize robust, contactless and application-specific sensing solutions.
Piher sensing technologies for robotic applications
Piher develops position and motion sensing solutions for demanding applications where precision, robustness and long service life are required.
For robotics, Piher sensor technologies can support angular position measurement, linear position feedback, tilt detection and control interface functions across industrial, mobile and autonomous systems.
Relevant sensing needs include:
- Rotary position feedback for robotic joints, steering systems, levers and shafts.
- Linear position feedback for actuators, slides, grippers and displacement measurement.
- Tilt and inclination sensing for mobile robots, lifting systems, platforms and stability monitoring.
- Non-contact sensing for long-life operation in applications where mechanical wear must be minimized.
- Robust sensor designs for environments exposed to vibration, temperature changes, dust, humidity or intensive duty cycles.
By selecting the right sensing technology early in the design phase, robotics manufacturers can improve control accuracy, simplify integration and increase system reliability.
The future of robotics depends on better feedback
Robots are becoming more intelligent, but intelligence alone is not enough. Every autonomous decision must be supported by accurate physical feedback.
Position sensors help robots know where they are. Speed sensing helps them control how they move. Tilt sensors help them understand orientation and stability.
Together, these sensors form a critical layer between the mechanical world and the digital control system. They allow robots to move with precision, adapt to changing conditions and operate safely around people, products and equipment.
As robotics continues to grow in factories, warehouses, service environments and mobile platforms, sensor content per robot will continue to increase. For robotics designers, reliable position, speed and tilt sensing is not a secondary detail. It is one of the foundations of safe and effective robot performance.