

This website uses cookies so that we can provide you with the best user experience possible. Cookie information is stored in your browser and performs functions such as recognising you when you return to our website and helping our team to understand which sections of the website you find most interesting and useful.
PSCM
Rotary Multiturn Hall-Effect Position Sensor
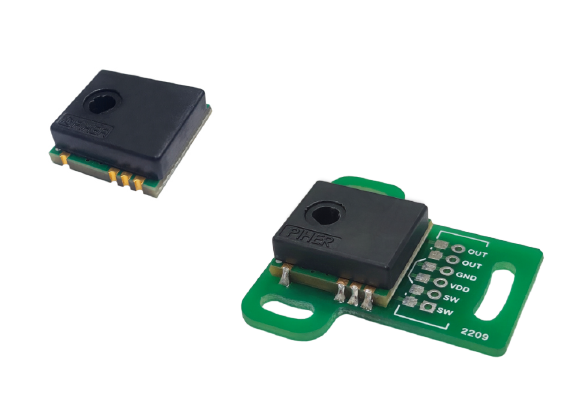
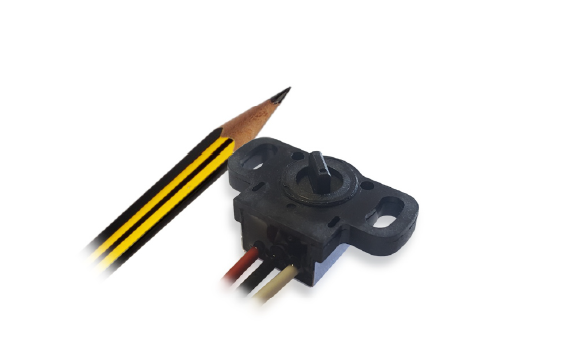
The PSCM is a non-contact multiturn angular position sensor based on Hall-effect technology and a cost-effective replacement for absolute encoders. It is also perfectly suited to substitute wire actuated sensors by translating a linear movement into angular position. In the event of a power loss, the sensor will preserve the last measured position.
This compact and rugged sensor is configurable with angular ranges between 720 and 11.520 degrees (up to 32 revolutions) and support for low and high-voltage power supply. The PSCM offers a standard absolute linearity of 1%, which can be customized upon request to 0.1% for applications requiring high accuracy.
The high level of ingress protection, vibration and temperature resistance makes this magnetic sensor well suited for extreme environments of industrial, off-highway, marine and transportation applications. Wire and connector assemblies are available on request.
KEY FEATURES
Without any gears or mechanical interfaces the sensor is easily assembled and calibrated and subject to limited wear and tear over lifetime.

Keeps the last position on power loss with configurable electrical angles from 720 to 11.520 degrees.

The rugged package protects the sensor from dust, moisture, vibration and extreme temperatures for usage in the most demanding environments.

The non-contacting design allows for an
extra-long product lifetime of up to 50
million cycles.
Programmable transfer function and
switch outputs as well as different output
protocols and redundancy levels
available
The magnet is securely fastened to the
shaft and acts as only moving component
in the sensor.
SPECIFICATIONS
| Linearity¹ | ±1% absolute (±0.1% on request) | |
| Electrical angular range | Configurable from 720° to 11.520° (2 to 32 turns) | |
| Output protocols2 | Analog (Ratiometric) | |
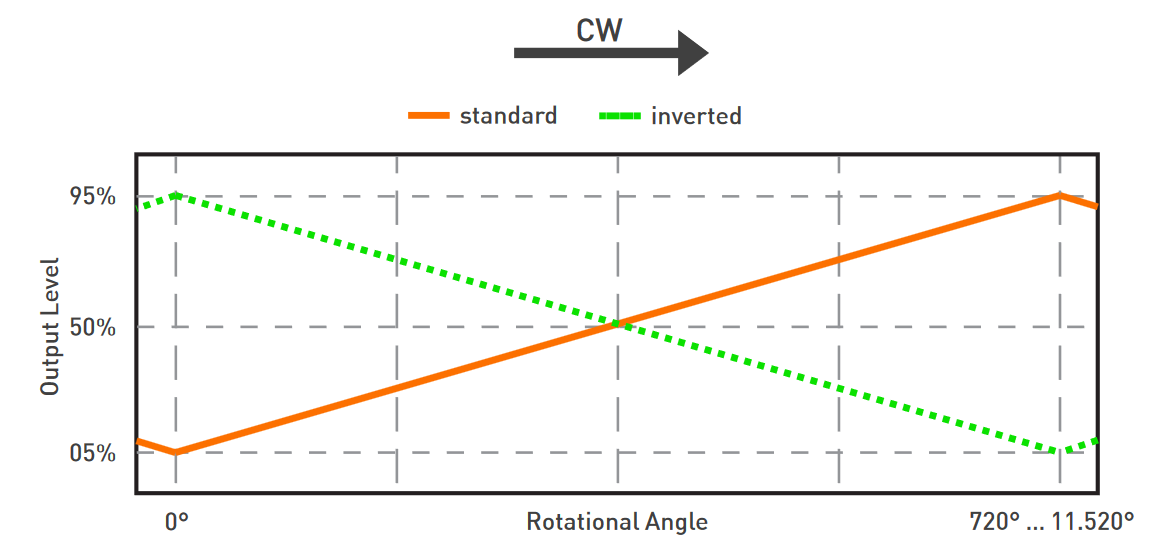
| Output curve |
standard inverted redundant3 |
05% to 95% Vdc (CW) 95% to 05% Vdc (CCW) 05% to 95% (CW and CCW) |
| Switch output | On request | |
| Resolution | Up to 12 bit | |
| Supply voltage4 |
5V ±10% 10V to 30V | |
| Supply current |
Single output Redundant output |
Typ 32.7 mA Typ 41.2 mA |
1 Ferromagnetic materials close to the sensor (e.g. shaft, mounting surface) may affect the sensor’s linearity.
2 Other output protocols / specifications available on request.
3 Redundant and other output functions available upon request.
4 Please note: Sensor saves last position if power is turned off, but does not count turns if not powered. For applications where the shaft may rotate while the system is not powered and the customer requires a true power-on absolute multi-turn position, Piher can also use an alternative non-contact multi-turn architecture based designed to record rotations of a magnetic system even while powered down and report the absolute position at power-up through. It supports more than 16,000°, and combines turn counting with angle sensing for absolute multi-turn position feedback that is an ideal fit for for applications such as boat lifts, actuators, winches, valves, hoists, and other equipment where the shaft can move without power and the control unit must recover the true position when power returns.
| Rotational life | Up to 50.000.000 cycles |
| Mechanical range | 360° (endless rotation) |
| Shaft diameter | 6mm |
| Operating and storage temperature* | -40° to +85°C |
| Shock | 50g |
| Vibration | 10-2000 Hz; 10g; Amax 0,75 mm |
* Higher on request
POTENTIAL APPLICATIONS